- 游戏
- 网游单机小游戏专题排行榜攻略资讯评测
- 软件
- 11应用专题排行榜教程
- 关于
- 广告合作网站地图意见反馈
机器人手臂拥有GT物流设备里校计器的进去位置输出的功能,并且它还能做到精确提取,当机械臂依附在用电设备上时,运作它需要消耗能源,这一特点类似传送机模块。

一般而言机械人手臂可以通过空手右击覆盖面修改设置,右击覆盖版的边缘能切换槽的位置,用螺丝刀能一次切换16个数值,它一共有三个模式
Grabs in for own Slot #(数字):提取外部容器物品,放入自身的第X格内,默认#0就是外部容器的第一个格子
Puts out into adjacent Slot #(数字):输出到外部容器的第X格
Offline:就是让覆盖版不工作,这个功能不吐槽
注意:①如果使用机械人手臂把物品提取进入机器时。GT的机器内部GUI从左往右,从下往上,默认第一个格子为常规容器的第5格。
于是呢,你所设置的Grabs in for own Slot 数值不应是0而是4
②机械臂需要依附在一个容器上,如果该容器是用电设备则需要能源才能运作
明显,如果想让一节管道具备机械臂的功能,单单把机械臂贴在管道上是不行的,而重新造一台设备则会显得没必要而且很浪费,这时候,我们需要模拟一台物流设备

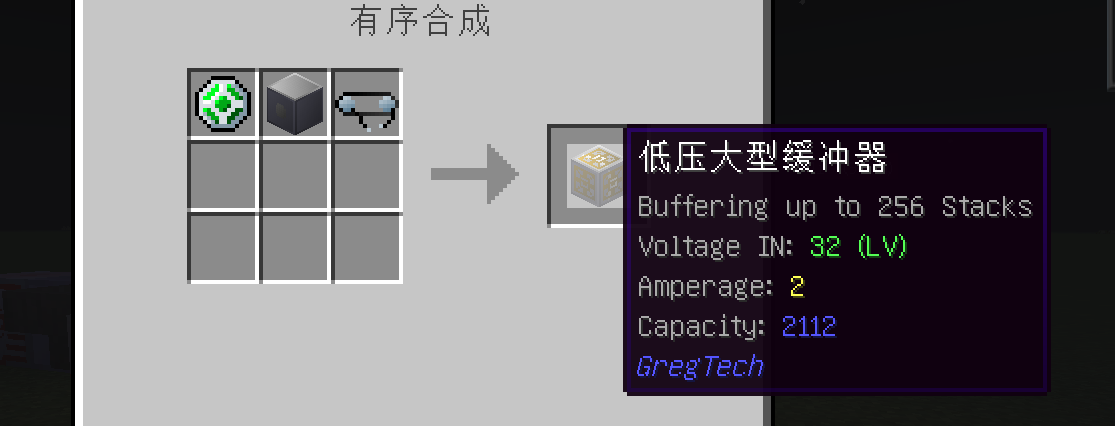
机壳是GT里一个提供给玩家自由创作的设备,就如字面意思,发挥你的想象力

机壳类似一个容器也是类似一个存电器,尽管那点点的储电量少到可以无视,任何种类的机壳都能缓存1组物品或者1000MB流体,但是机壳在GT里被归类为用电设备,于是你所添加的覆盖版需要通入能源才能运作
如图:如果我们把机械臂贴在机壳并通上电时,传送机提取的物品就能精确放入目标容器槽了
其实机壳的另一个另类用法是担当限流器,机壳有一个能源输出口默认只能输出1A,电压等级取决于机壳的等级。





累计评论0条
展开其余评论